Introduction
This week we began lecture by discussing what can go wrong when surveying, including having your survey equipment detained by customs. In order to continue with the task, one has to have alternate measuring methods at their disposal. It's always a good idea to have multiple survey methods in case of failure or other issues. One of these methods is the distance-azimuth sampling technique. The purpose of this week's exercise was to create a map using this technique.
In order to create a map using the distance-azimuth technique we employed two pieces of equipment, the azimuth and a laser distance measuring tool. The azimuth, which is sometimes referred to as a bearing, is a compass-like device that measures degrees, from 0 to 360 . The laser distance measuring tool uses a laser device and distance finder to send and receive laser pulses in order to measure distance in meters. (Figure 1).
 |
| Figure 1. Laser device, distance finder, and azimuth compass tools used on this survey. This image was taken by past geography student Tonya Olson. |
Survey Area
The survey area for this lab was the UWEC campus mall. We chose this area because it contained many features including stone benches, trees, and light poles, all within a visible plain with minimal obstructions. There were other potential surveying points on the same plain which made this area an attractive subject. A high vantage point of the area obtained from the third floor of the Davies Center offered a clear panoramic view for data analysis (Figure 2.)
 |
| Figure 2. Panoramic view of the survey area; UWEC campus mall between the Davies Center and Schofield Hall. |
Because of construction occurring on Schofield hall, a portion of the campus mall was omitted from the survey due to the inability to access the area (Figure 3).
 |
| Figure 3. The area of the campus mall that was ommitted from the survey due to construction occurring on Schofield hall. |
Methods
For this exercise we were split into groups of two. My partner and I decided to use the 'old school' method of azimuth compass, a laser device and distance finder. We chose this method because during the lecture time we had the good fortune to need to use this method while the rest of the class used the Tru Pulse laser, which are the tools previously listed combined into one piece of equipment. Luckily for us and unfortunately for the rest of the class, the Tru Pulse laser method was determined to be especially sensitive to EMI, or Electromagnetic Interference, emitting from underground power lines beneath the survey area. Wifi interference may have also affected the survey. Because of the concerns posed during this initial survey we were especially careful to keep all cell phones and metal that may affect the measurements away from the equipment during our actual survey.
Our data collection was done on a portable tablet in the field. Because we could collect directly in Excel, this prevented us from needing to reformat our measurements and perform tedious data entry. The latitude (x), longitude (y), distance (Meters), and azimuth (degrees) were collected along with a feature description (Figure 4).
 |
| Figure 4. Sample view of data collection table with columns for X, Y, distance, azimuth, and feature. Because all of the benches were surveyed first, that is the only visible feature in this view of the table. |
A coordinate system was crucial because without one, the points are meaningless data that could occur anywhere on earth. Coordinate points 'tie down' a starting point from which to designate distance and bearing. Because we needed standard points from which to measure, we chose a single sidewalk crack in the center of a swirling sidewalk feature (Figure 5), a crack by a light pole, and the intersection of another swirling sidewalk feature.
 |
| Figure 5. Areas where the survey measurements were taken from. |
Because the 'old school' method we used required two people, I held the receiver at chest height at each of the points. Because I wanted to keep the measurements consistent, I held the receiver at the back and center of each bench. This was made slightly physically difficult and socially awkward when the benches were occupied by scholars or individuals participating in courtship behavior. For trees and light poles the receiver was held at chest height in front of the feature. Dillian held the distance finder, the compass, and the tablet. He first looked through the azimuth using both eyes and measured the degree of the feature. Then, he pointed the distance finder at the receiver I held above at each feature points and read the laser output measurement for the distance, which he recorded (Figure 6).
 |
| Figure 6. Dillian using the compass and distance finder and then recording the data on a tablet. I am holding the receiver at each of the points in the back center of each bench (unshown). |
We then switched positions when we chose the next standard points at the back at Schofield Hall and on the sidewalk swirls outside of Phillips Hall. I collected the data and Dillian held the receiver. In order to prevent skipped or doubly surveyed points, we used pink survey tape to mark the trees and light poles already recorded (Figure 7), and the benches that should be recorded when our standard point changed (Figure 8).
 |
| Figure 7. Survey tape marking a tree that whose bearing and distance was already collected. Note the expertly tied bow. |
 |
| Figure 8. Survey tape marking benches that needed to be resurveyed because they were too far away from the initial point from which to collect data. Because the benches were arranged in simple concentric circles, it was only necessary to mark the features which were not collected. |
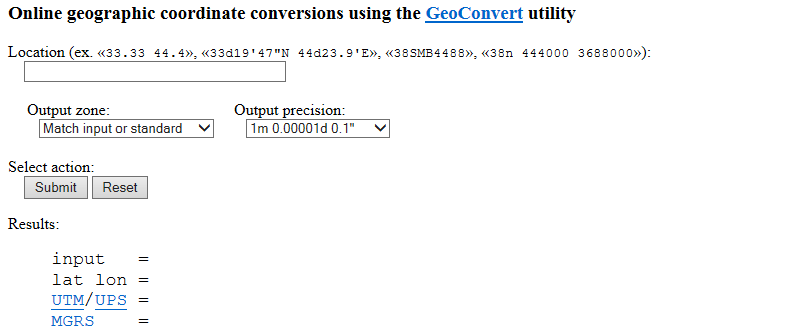
We also remembered to collect the coordinates of the standard points. We needed to convert the degree minute second form to the decimal form in order to input it into ArcMap. To do this we used a simple online converter tool (Figure 9). These numbers served as the X and Y for each of our points collected using that standard point. We used more than one standard point because not all features were easily visible or easily collected from one point.
 |
| Figure 9. Coordinate system converter. |
After the measurements were collected, ArcMap was used to display the azimuth and distance data at the same time. First, the Bearing Distance to Line tool was used (Figure 10), matching the input data to the Excel data, the X to X (latitude), the Y to Y (longitude), the distance to distance(meters), the bearing field to azimuth field, and the object ID to the feature field (bench, tree, light pole). I then ran the tool and dragged the newly created feature onto the map (Figure 11.)\
 |
| Figure 10. The Bearing Distance To Line Tool. The bearing distance to line tool combines the bearing degree and distance to map data relative to a central point. |
 |
| Figure 11. Map feature created from importing the data we collected. Unshown is the data collected from outside of the Phillips building because of scale issues. The feature was originally colored green but was later changed to red for visibility purposes. |
In order to validate that the points were in the correct spot I added a base map of the Eau Claire Campus collected from satellite data before 2014. At first I was confused why the data was appearing in a place I didn't recognize although I was sure that the coordinates were correct. I then realized that the base data I added was no longer relevant as it was imagery from before the campus reconstruction and my survey area was not showing up simply because it had not been constructed yet in the image (Figure 12).
 |
| Figure 12. The correct data as shown on an outdated base map, before the construction of the feature area. |
I then reimported a more recent map of the survey area and our collection point appeared to be in the correct place although the points were slightly off of where they were measured in the field. This image is also not completely up to date as some of the trees we measured have not yet been planted in this image (Figure 13).
 |
| Figure 13. The data displayed on the most recent map I could find. Note the construction still occurring in the top right corner. |
We then needed to change our vertices to lines to more easily analyze the data. To do this I searched for the tool Feature Vertices To Points in the search bar. (Figure 14) It opened a window in which I specified my input data and output location. It gave me the options for 'point type' and selected 'ends' because I only wanted the ends to have a point. (Figure 15).
 |
Figure 14. Feature Vertices to Points Tool
|
 |
| Figure 15. Feature Vertices To Line Tool window. Note how 'end' is selected for the point type. |
I dragged the new point features onto my base mapping. This resulted in my final map. (Figure 16). Using this map it was far easier to analyze the accuracy of my data.
 |
| Figure 16. The final map with all of the points laid out. This format is a much easier way to analyze the data. |
Discussion
Our 'back up plan' survey method could have used a back up plan. Unfortunately there were both intrinsic and extrinsic sources of error. The map does not display the correct points on the correct features even though the source point is in the correct place. This indicates that the alignment issues are not primarily caused by coordinate issues, but are more likely errors that occurred during collection. However, we also ran into coordinate system issues. We initially collected the latitude and longitude of our source point using the compass on our phones. Because our phones only displayed the coordinate to the second, all of the points resulted in the same coordinate. (Figure 17) In order to remedy this we used Google Earth to estimate the coordinate points which may have had slight variation depending on how we hovered the mouse over the point.
 |
| Figure 17. The compass reading given by all of the standard points. Because this compass was not accurate enough, all of the data would be shown emitting from a single point which would cause significantly more alignment issues. |
Other issues were the result of data collection. Although EMI was discussed after the failure of the Tru Pulse laser, it may have still occurred. I realized after the survey that because of the swirling sidewalk's dual function as a walkway and performance space during outside events, there is likely a large electrical outlet beneath the space with many wires passing under the area. It's possible that our compass's accuracy was compromised because of these unseen features.
We initially chose our method because of failure of the Tru Laser during the lecture period due to EMI. We wanted to avoid potential issues, but by electing to employ the 'old school' method we resigned ourselves to an already less accurate method. This method produced extra challenges collecting points that were far away. Not only is the accuracy of these distances decreased the farther away from the laser the point is, we also had significant difficulty in hitting the receiver with the laser enough to obtain a measurement. Because of this, some features such as far away trees and light poles were omitted from the final survey.
Finally, human error may have played a significant role in the inaccuracy of our data. It is difficult to use the compass to determine bearing during even the most favorable conditions. The time of the survey and the angle of the sun made it very uncomfortable on the eyes to determine the bearing. We were unable to use sunglasses and still read the degree so we had to squint our way through data collection. My partner and I also had two major ocular differences that may have compromised the the accuracy of our data collection. I am left eye dominant and my partner is right eye dominant. This means that we each held the compass in a slightly different way and took slightly different measurements. The other ocular difference my partner and I had was that I believe Dillian to have strabismus amblyopia meaning that our eyes aren't aligned in the same way which would account for the accuracy differences between the areas each of us surveyed.
All of the issues may account for the inaccuracy of the final map. Unfortunately many of this issues cannot be solved without resurveying the entire project. I would have liked to have been able to compare the results of the Tru Laser method to our method and see what kind of issues could have been solved using a different method.
Conclusion
It's important to have many ways of accomplishing a goal. This exercise was to teach us how to use alternative methods when things go wrong. Sometimes, the methods we use aren't always the most time efficient and easy way. Unfortunately for us, things went wrong in our back up plan method, although this taught us about resourcefulness and the ability to critically think about sources of error. It's important to realize what went wrong so that it can be fixed during the next survey. Although we ran into many problems I believe I can account for these issues the next time I survey. I am pleased that I can now add this method to my surveying repertoire.
Resources:
GeoConvert
ArcGIS Online Help
Google Earth