The goal of this week was to design our own feature class, fields and domains using customized and data collection parameters in order to use our smartphones and the ArcCollector app to obtain data points with which to create a map detailing the information of a subject of our choice. Because we had to choose our own topic and decide which parameters we wanted to include, this activity required much planning and forethought. It also required a decent amount of knowledge about our subject as we had to be able to identify subject features well enough to warrant their collection. After data collection we were to use the ArcCollector app on our smartphones to create a map of our subject features. Smartphones are an incredibly practical device for informal geospatial work. They contain their own GPS system, can access the internet, and are pocket and user friendly. Being able to utilize features of devices we already have can expand our practical knowledge of our geospatial field skills.
Methods
The exercise began with Prof. Hupy demonstrating the proper way to create domains, set acceptable field ranges, categorize our data with subtypes, and include fields vital to almost every project; date and note fields. Spending time properly setting up your collection criteria improves your experience in the field.
My topic was illness of UWEC campus trees. I wanted to see if tree health could be correlated with both the treatment the tree received such as mulching, pruning, or application of tree wrap, and the groundcover the tree was surround by. I hypothesized that the healthiest trees would be surrounded by a high plant diversity groundcover, and the most sick trees would be surrounded by gravel, asphalt, and monocultures of Poa pratensis, Kentucky Blue Grass. (Figure 1.)
 |
| Figure 1. Example of a tree on campus surrounded by monoculture of Poa pratensis. |
For each domain I set up, I chose either a range domain or a coded domain. A range domain accepts a range of values for each attribute. I used this for collecting information such as tree diameter at breast height (DBH). I set the range so that valid values were 1-30 inches. Coded domains accept a set of codes for an attribute. I use this for non-numerical data such as tree type, groundcover (Figure 2.) treatment, and illness. (Figure 3.)
 |
| Figure 2. Valid groundcover choices. |
 |
| Figure 3. Tree Illness acceptable codes. |
Collecting data was surprisingly simple. The GPS on my phone knew where I was on the map so I only needed to hold my phone over the tree, select the data criteria that I observed, and click submit.
Using the app, I collected information on 40 trees surrounding the UWEC Davies center. I chose this location because its wide range of ornamental, naturally growing, and recently planted trees gave me a good cross section of campus tree health under a variety of conditions. (Figure 4.)
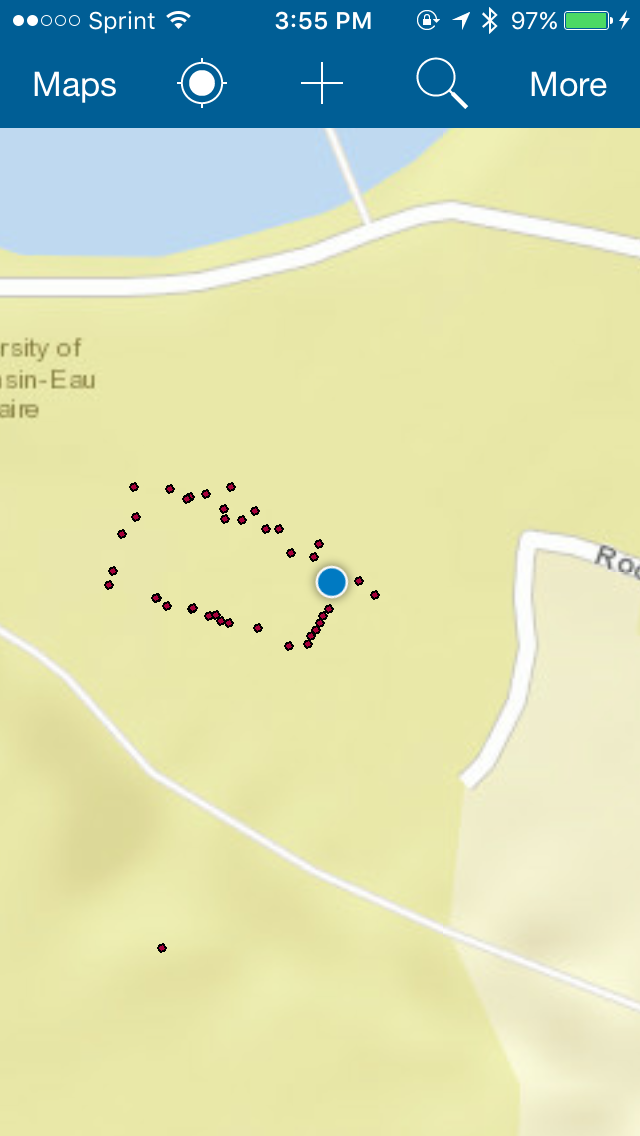 |
| Figure 4. Map of all of the data points collected. |
Results
The data I collected show a correlation between tree health and the quality of groundcover. Of my 40 trees surveyed, there were four that were surrounded by gravel. (Figure 5.) All of these trees showed illnesses including lichen, broken branches, and wounded limbs. This may also be because of it's close proximity to the parking meters. The healthiest trees, those showing no visible illness were those that were planted among communities that were well mulched, an had a large diversity of plants as groundcover. (Figure 6.)
 |
| Figure 5. The health of the trees surrounded by gravel (left) was severely less than trees that were mulched and surrounded by other species (right). |
 |
| Figure 6. The ornamental trees that were both mulched an surrounded by a variety of species were in best health. |
Discussion
Things like taking time to set up a geodatabase, feature class and attributes are not what immediately comes to mind when you imagine the data collection process. Nonetheless it is arguably one of the most important aspects of data collection. A study is only as good as it's least accurate data so it stands to reason that it is also only as good as your data collection methods.
At the same time, too much specificity clutters up the data collection process, can cause inefficient issues an poses the increased risk of inaccurate data collection. Therefore there is always the need to know your subject well enough to create relevant fields with room for taking extra notes if needed.
Creating a 'notes' field helps alleviate issues that arise due to nature, unusual occurrences, or criteria that you forgot in the initial setup. It is goo practice when you come upon a feature that cannot be accurately accounted to take notes on it, and return to the feature in post-processing for analysis. This is a more scientifically ethical method than simply skipping over a feature.
Conclusion
I found that the most important aspects of this exercise were sufficient preparation of collection methods and knowing the subject enough to know what data was essential and what was extraneous. I never knew that my personal phone was capable of data collection in this way and I am pleased to get a chance to find a new, potentially more efficient way to collect information.